This website uses cookies to help us give you the best experience when you visit our website. By continuing to use this website, you consent to our use of these cookies.
Présentation de la plate-forme fabMSTIC est un réseau local de ressources technique de prototypage rapide situé sur le campus de Saint Martin D’Hères. Sa mission est de faciliter la créativité, l’échange entre équipes et les disciplines, faciliter certaines recherches et valoriser les projets en ouvrant l’accès à des machines outils pour le prototypage rapide, faciliter la vulgarisation et la communication scientifique. Cette démarche initiée par le laboratoire LIG en 2013 à vocation à s’ouvrir à l’ensemble des 8 laboratoires de la communauté MSTIC (Gipsa-lab, Verimag, LJK, TIMC, TIMA, GSCOP, Institu Fourier, LIG).
L’atelier fabMSTIC du LIG met à disposition un inventaire évolutif de savoir-faire et de moyens pour perme- ttre aux chercheurs de fabriquer des prototypes, des supports et toutes productions permettant d’avancer dans sa recherche ou de valoriser ses travaux.
L’actuel atelier est encore provisoire. A très court terme, nous allons aménager un espace pour assurer les fonctions :
d’échange social et de vitrine : espace de réunion propice à la discussion et au travail collaboratif pour un groupe d’une dizaine de personnes, avec également un espace vitrine des réalisations et des résultats de recherche locale,
de fabrication : espace sécurisé et adapté à la manipulation des machines de fabrication à commande numérique,
de stockage : espace réduit permettant d’entreposer l’ensemble des consommables (plastiques, bois, plexi- glass) utilisés par les équipements.
Les ressources techniques au service de la recherche Les ressources techniques aujourd’hui disponibles à l’atelier FabMSTIC-LIG comprennent notamment une imprimante 3D, une découpeuse laser, une fraiseuse et une thermo-formeuse.
Les équipements MSTIC
Le fabMSTIC met également à disposition des ses utilisateurs un accompagnement opérationnel, pédagogique, technique et logistique en plus de l’accès aux équipements de fabrication de l’atelier pour le soutien dans la réalisation de leur recherche. L’ingénieur de recherche Jérôme Maisonnasse assure cette mission.
L'accompagnement
Faits marquants depuis sa mise en œuvre en mai 2013
Mai 2013 : La mise en oeuvre du projet a démarré mai 2013 avec l’embauche de l’ingénieur de recherche Jérôme Maisonnasse.
Décembre 2013 : Achats des équipements finalisés.
Réalisation des premiers prototypes recherche :
Céline COUTRIX, équipe IIHM, laboratoire LIG :
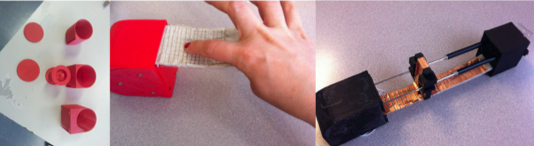
La percée scientifique de ce projet est d’apporter à l’utilisateur la possibilité d’ajuster les propriétés de contrôle de son interface tangible via sa déformation. Parmi les propriétés du contrôle, on trouve la résolution, la définition, le nombre de dimensions, l’intervalle, etc. Aujourd’hui, la déformabilité de l’interface a été confinée au contrôle lui-même, à la prise en main, à l’apparition de nouvelles modalités de contrôle ou au retour d’information haptique. Ce projet remet en cause cette approche en proposant de tirer profit de la déformabilité pour ajuster les propriétés du contrôle de l’interface. Les prototypes vont permettre de valider mes hypothèses dans le cadre d’expérimentations avec des utilisateurs. Evolution des prototypes d’interfaces tactile souple (en rouge), curseur capacitif (en noir)
Évolution des prototypes d’interfaces tactiles souple (en rouge), curseur capacitif (en noir)
PACCOUD, équipe IMAGINE, laboratoire LJK :
“Dans la cadre du projet HaptiHand, nous avons duˆ développer une interface physique permettant de manipuler un bras à retour de force. Cette interface est composée de différents modules permettant à l’utilisateur d’interagir avec une interface virtuelle. Pour la réalisation du prototype, nous avons utilisé l’impression 3D du fabMSTIC. En effet, ce process de prototypage rapide permet de donner corps rapidement à nos conception 3D et nous pouvons alors les tester. Même si la résistance mécanique n’est pas la même que celle du produit final, la géométrie reste la même et nous permet donc de voir si la prise en main est bonne.”
Réalisation de supports et d’outils spécifiques pour la recherche :
François Bérard, équipe IIHM, laboratoire LIG :
“Ce qui m’intéresse particulièrement c’est la possibilité de créer rapidement des ob jets conçus spécifiquement pour une expérimentation particulière. Cette possibilité nous permet d’envisager des manipulations expérimentales que nous n’aurions pas considéré jusqu’ici, car elles auraient demandé des efforts en temps et argent trop importants.”
Amélie Rochet Cappelan, département Parole et Cognition , laboratoire GIPSA-Lab Dans le cadre d’un projet de recherche sur la création d’outils orthophoniques, les ressources du fablab sont employées dans la production de pièces spécifiques d’un jeu destiné à favoriser l’apprentissage de la parole.
Réalisation de supports de démonstration :
Didier Donsez, Vivien Quéma, équipe ERODS
Robair est une plate-forme robotique open hardware réalisable dans un contexte fablab intégrant des éléments de la grande consommation (châssis bois découpé au laser, corps composé de pôts de fleur, moteur de perceuse). Robair est utilisé dans le cadre de la recherche en robotique companion. Robair est un robot de téléprésence qui dispose des moyens moteur et de perception pour interagir en lieu et place d’un utilisateur distant présent à l’aide d’un système de visioconférence porté par le robot.
Évolution du robots (à gauche); Présentation à IoT 2014 Grenoble (à droite)
Démonstration intelligence ambiante (collaboration ENSIMAG), colloque Eclipse IoT (Internet of Things) Day Grenoble 2014 avec la fondation Eclipse. A travers la réalisation de maquettes, chercheurs et industriels ont pu découvrir des applications concrètes de plate-formes logiciels (Open Hab) et de protocols dédiés à l’internet des objets (MQTT).
Valorisation de recherche appliquée au fablab
Frédéric Wagner, equipe MOAIS, laboratoire LIG
Frédéric Wagner a développé un programme de packing permettant de réaliser des boites en bois avec des motifs complexes en prenant en compte la quantité de consommable disponible (“packing”). L’application de ses connaissances en algorithmique et optimisation trouve dans le contexte fablab un champ applicatif et de valorisation. Un travail sur l’optimisation des parcours va être mené dans le cadre d’un projet d’enseignement. Ces résultats ont éveillé l’intérêt du constructeur de la découpeuse Laser : gain de temps, moins de consommable perdu.
“les robots volants” avec l’intervention de N. MARCHAND (Gipsa-lab), réunion d’une dizaine de personnes (TIMA, VERIMAG, LIG, équipe PRIMA de l’INRIA, Gipsa-lab).
“Robot et fablab” avec l’intervention de Jérôme Maisonnasse (LIG) dans le cadre de la journée atelier Robotex Day (organisé par Gipsa Lab), avril 2014, Equipex : N. ANR-10-EQPX- 44-01